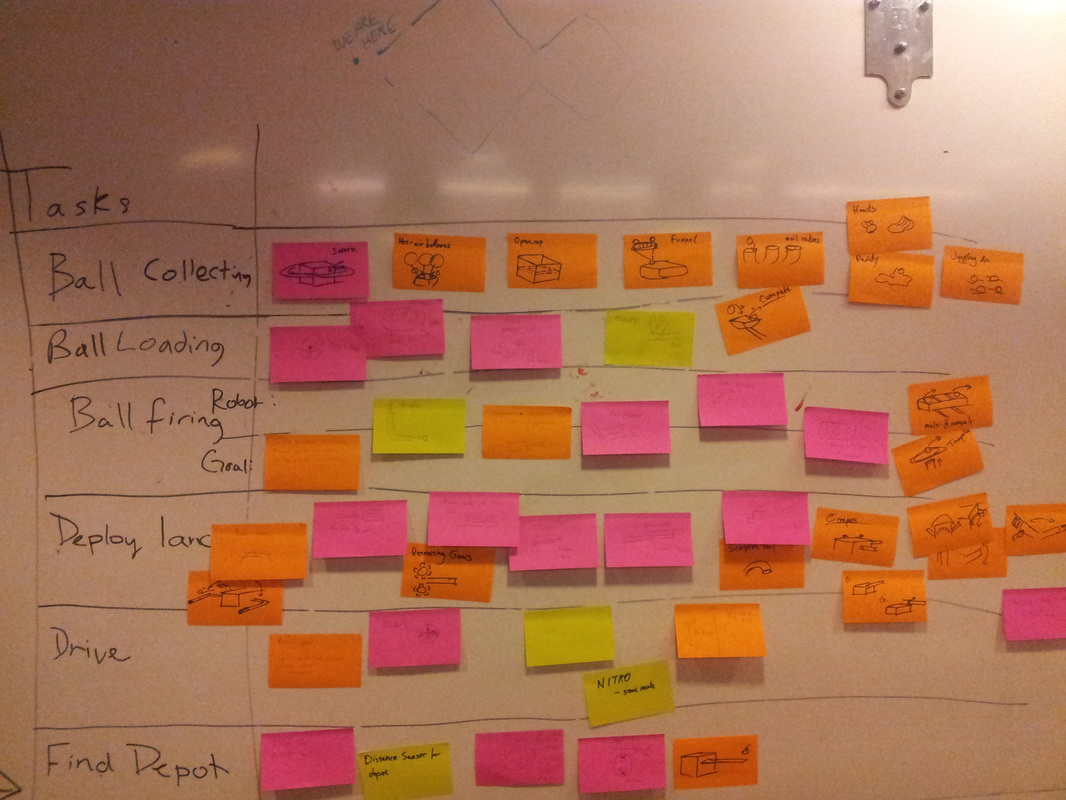
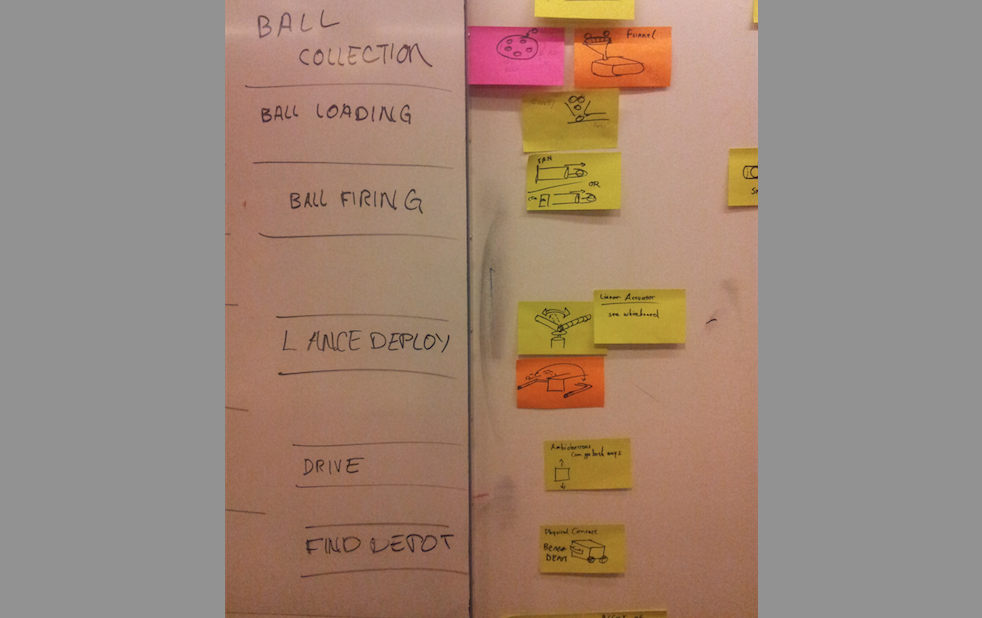
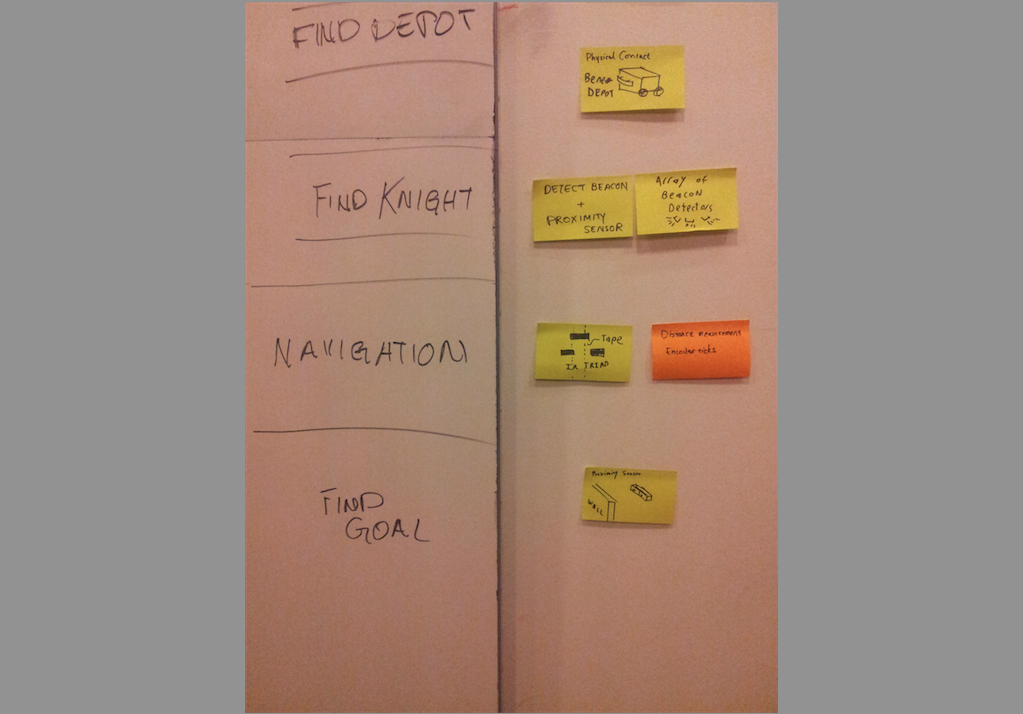
Initial Brainstorm


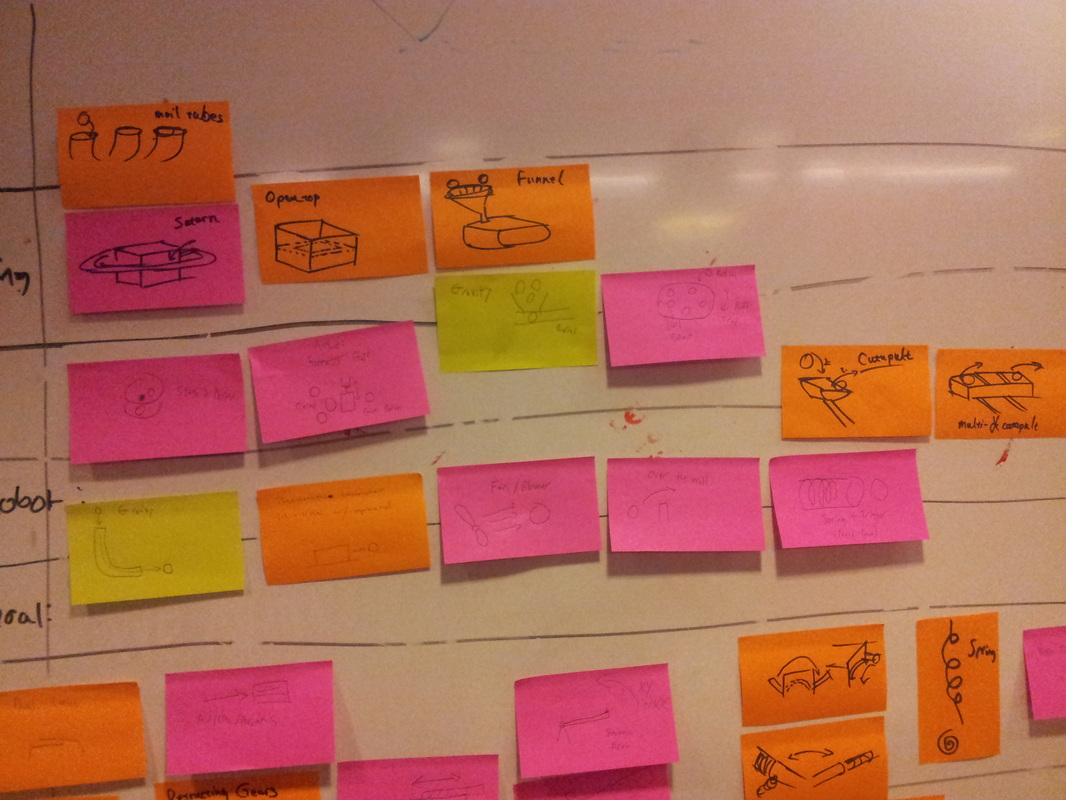
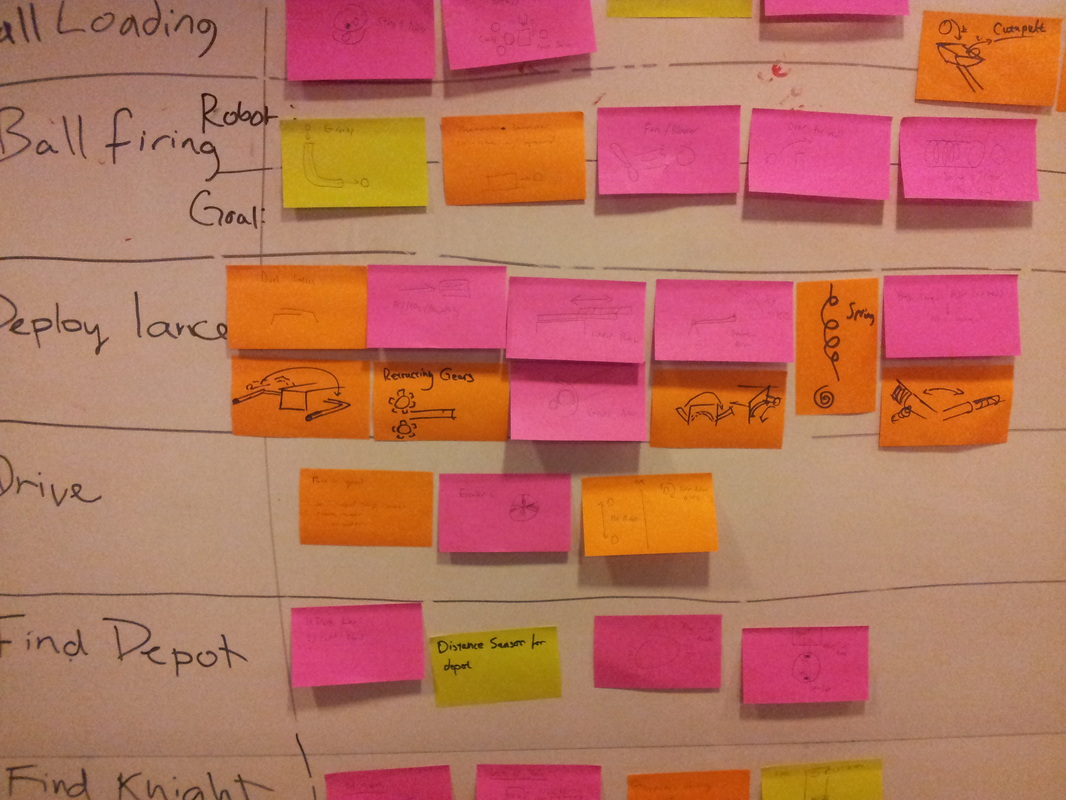

Simple Bot / Good Bot
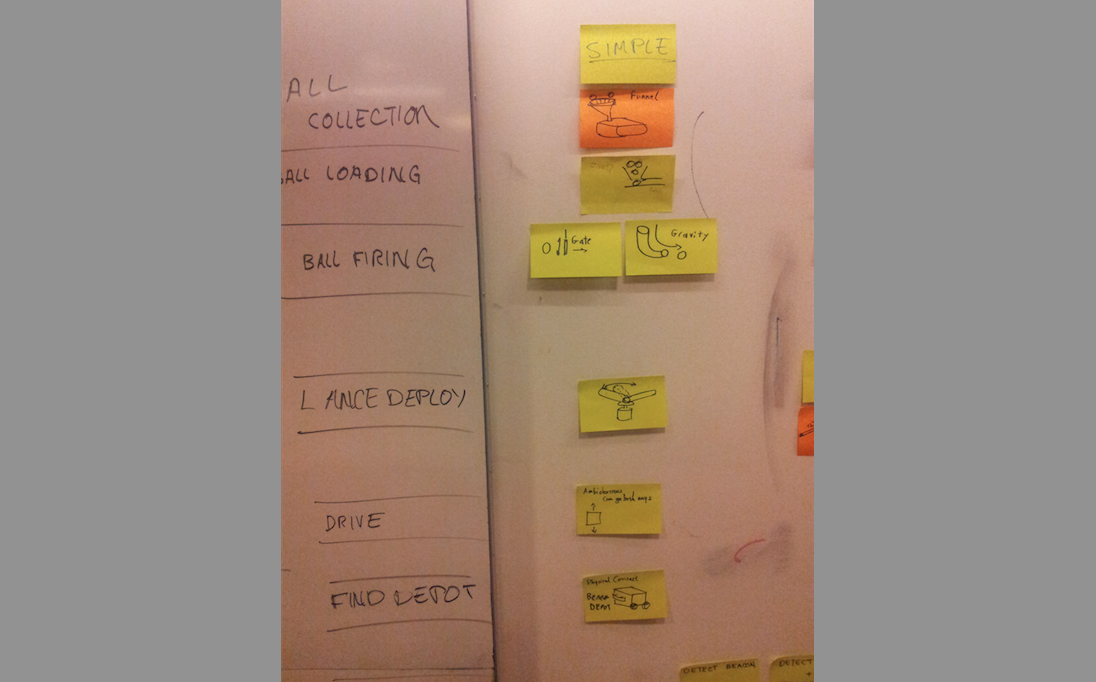
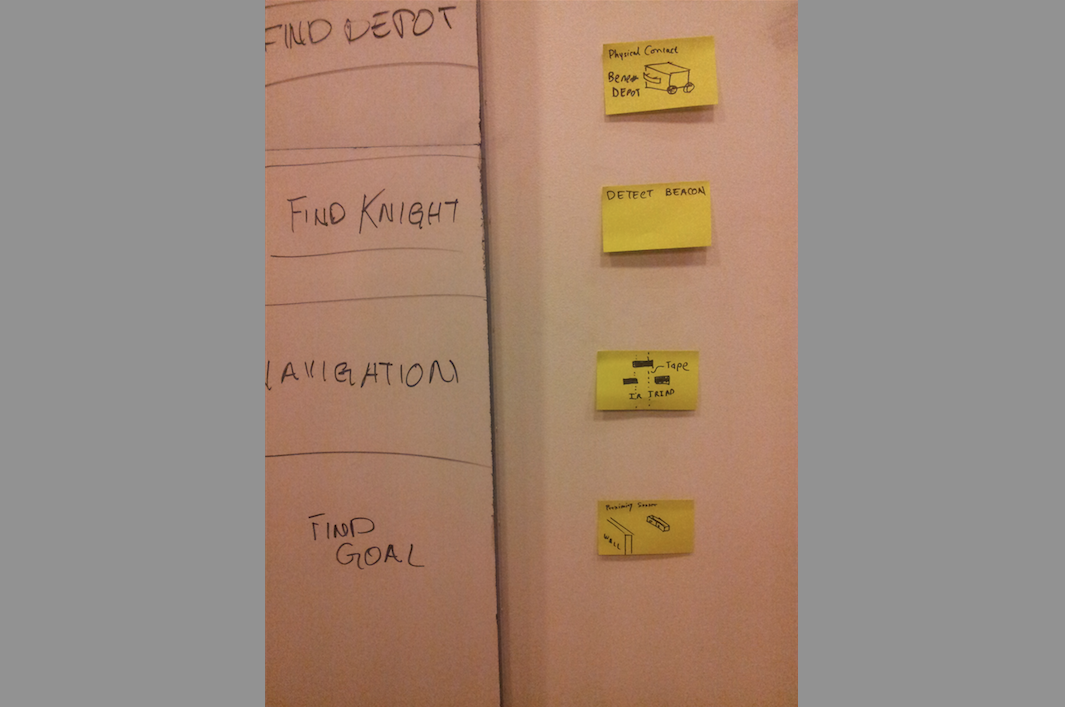
After the initial brainstorm and narrowing of ideas, we crystallized the brainstorm into two concept bots: a simple bot and a good bot. The simple bot was comprised of the simplest solutions we thought of for each of the different aspects of the bot (ball firing, lance deploying, etc.). The good bot was comprised of solutions we thouht were a bit more complicated.
After the initial brainstorm and narrowing of ideas, we crystallized the brainstorm into two concept bots: a simple bot and a good bot. The simple bot was comprised of the simplest solutions we thought of for each of the different aspects of the bot (ball firing, lance deploying, etc.). The good bot was comprised of solutions we thouht were a bit more complicated.
ProtoBot
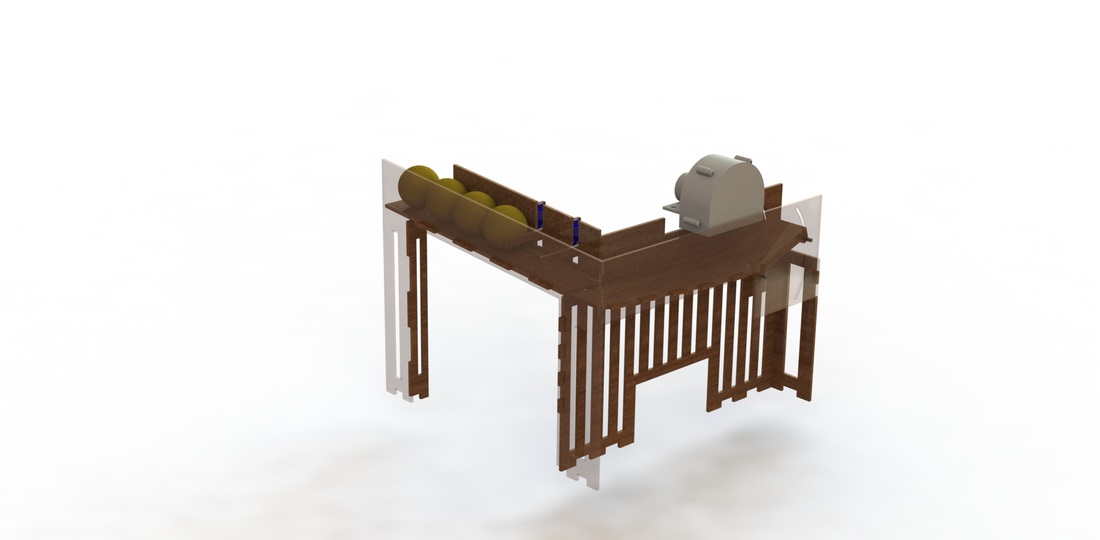
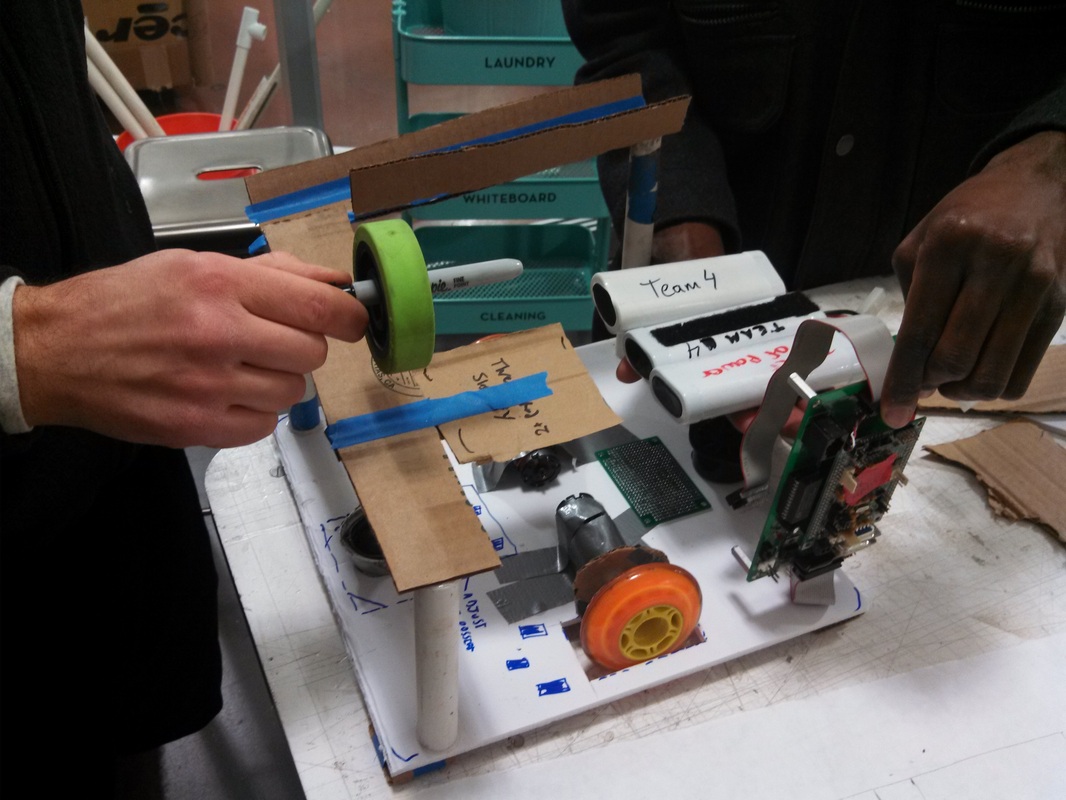
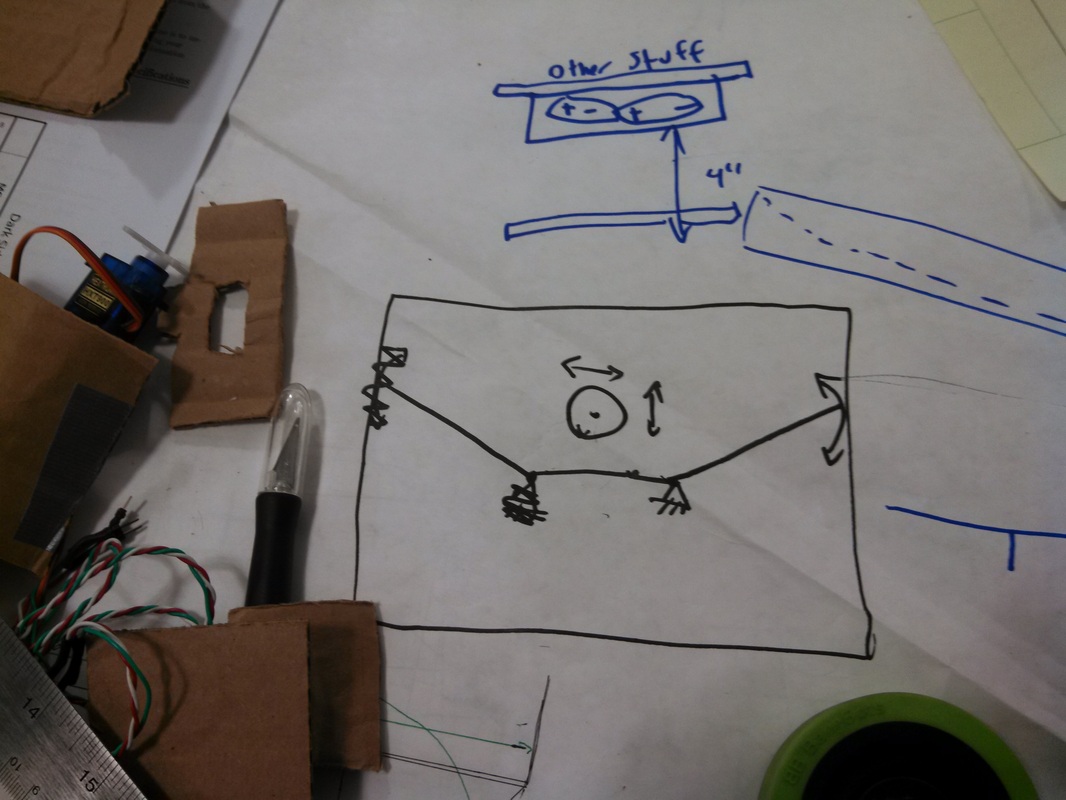
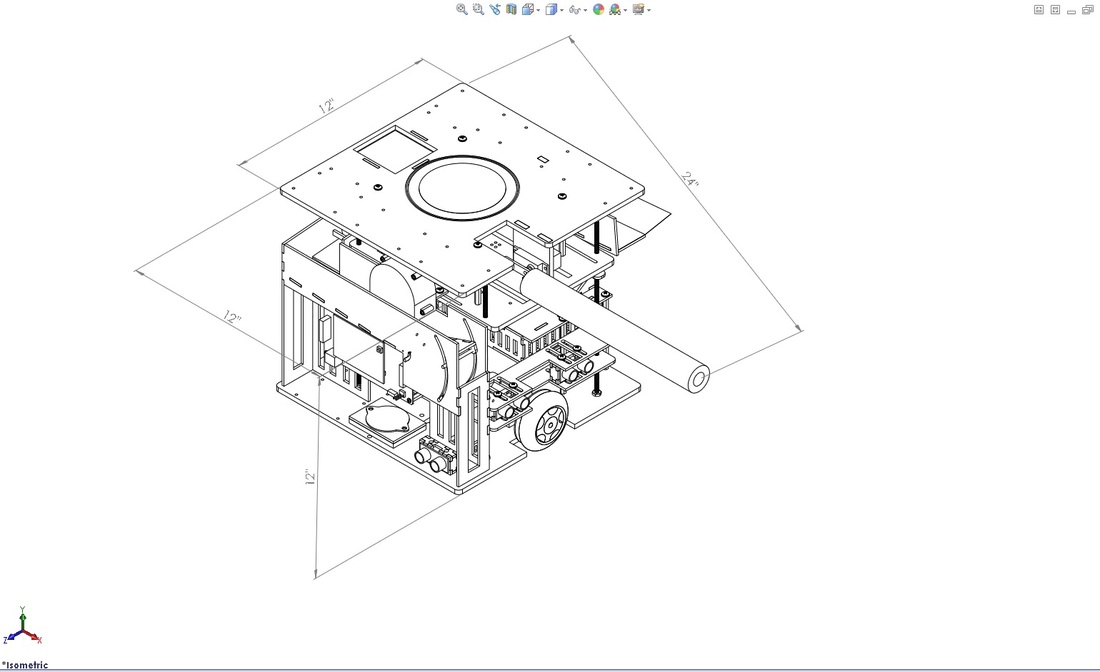
Building a quick prototype of the Megatron knight-bot was tremendously useful in getting a sense of how much space different mechanisms would occupy in the overall structure of the bot. It also helped convey how much space we had available to us given the height restriction of 12 inches.
Building a quick prototype of the Megatron knight-bot was tremendously useful in getting a sense of how much space different mechanisms would occupy in the overall structure of the bot. It also helped convey how much space we had available to us given the height restriction of 12 inches.
Final Design
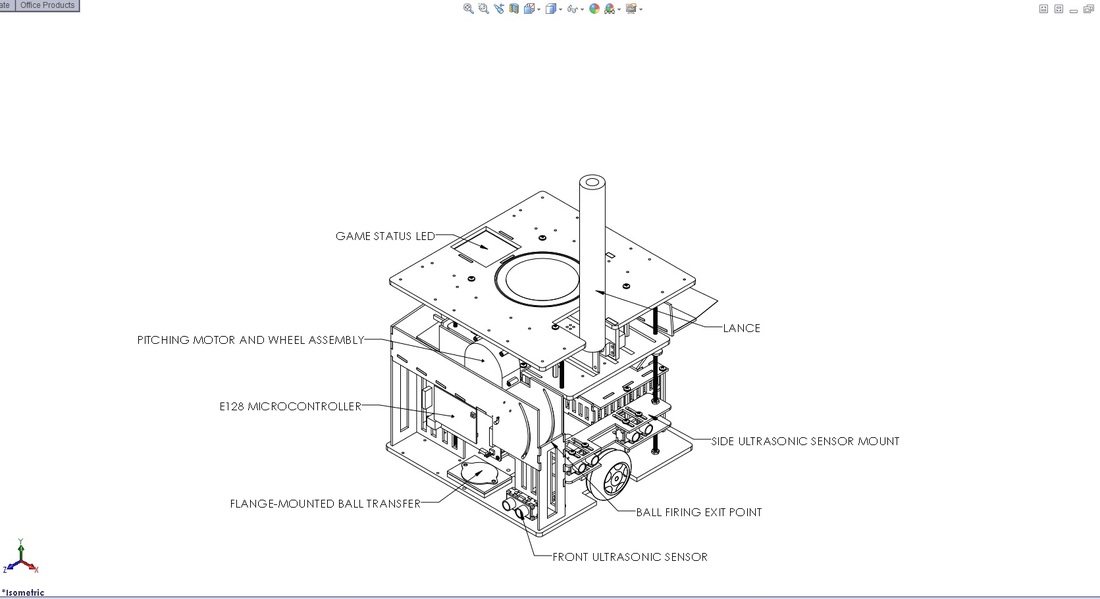
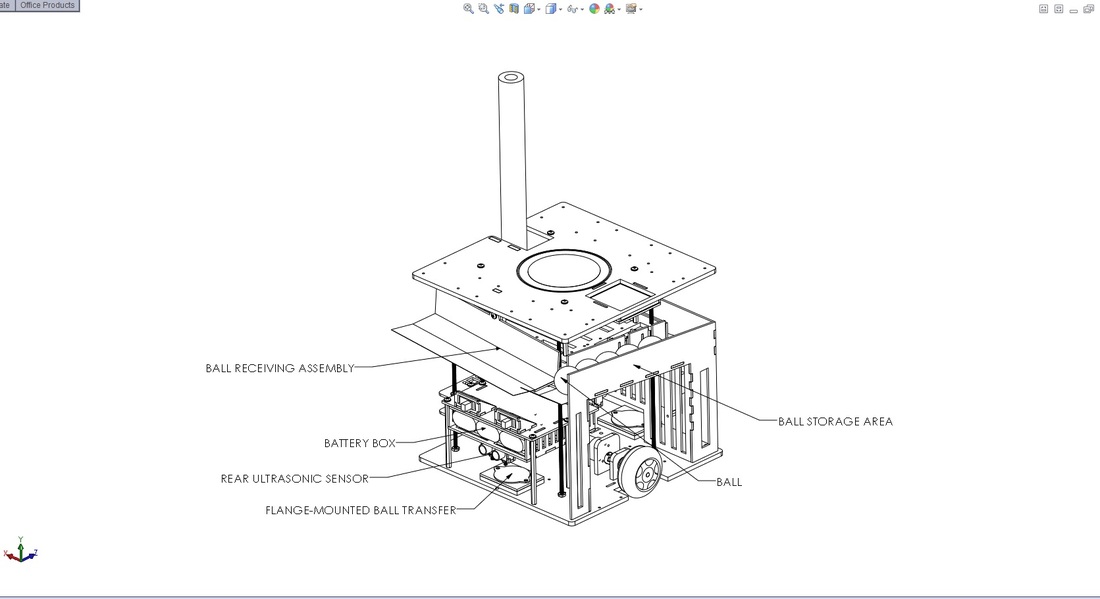
Overall Features
Overall Features


Lance Assembly and Battery Drawer
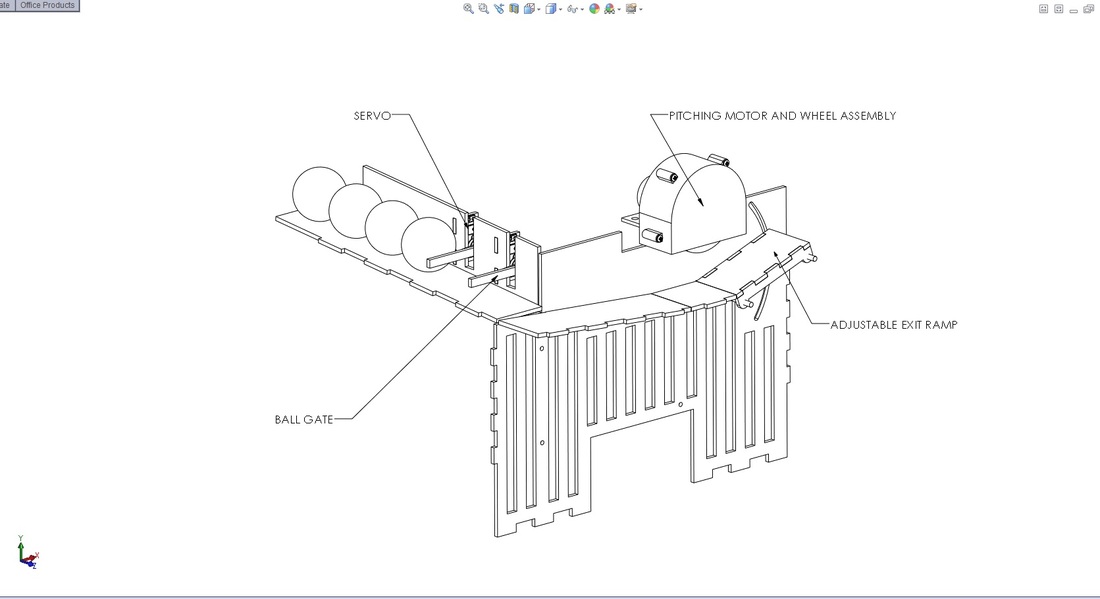
Per the rules of the Joustball competition, the lance can be deployed for, at most, 3 sec. After that it has to be in its default position for 1 sec before being deployed again. For the lance actuation, we utilized a servo motor, securing the lance to the end of its shaft.
The battery drawer served as the container for our our batteries, each rated at about 7.2 volts. Two of them were tied in series (14 volts total) to power the drive train and our Infrared Emitter Bar (details in "Circuits" section) and the third battery was regulated to 5V and used as the power source for the remaining circuits on the bot. Separating the power supply to the motors from the supply to the other circuits was a preventative measure against noise issues arising in those other circuits, especially the Knight Sensing and the Goal Sensing Circuit. Another detail of the battrery are the ventilation slots, which were included to mitigate heating issues for the batteries.
Per the rules of the Joustball competition, the lance can be deployed for, at most, 3 sec. After that it has to be in its default position for 1 sec before being deployed again. For the lance actuation, we utilized a servo motor, securing the lance to the end of its shaft.
The battery drawer served as the container for our our batteries, each rated at about 7.2 volts. Two of them were tied in series (14 volts total) to power the drive train and our Infrared Emitter Bar (details in "Circuits" section) and the third battery was regulated to 5V and used as the power source for the remaining circuits on the bot. Separating the power supply to the motors from the supply to the other circuits was a preventative measure against noise issues arising in those other circuits, especially the Knight Sensing and the Goal Sensing Circuit. Another detail of the battrery are the ventilation slots, which were included to mitigate heating issues for the batteries.
Megatron Key Feature: Driving
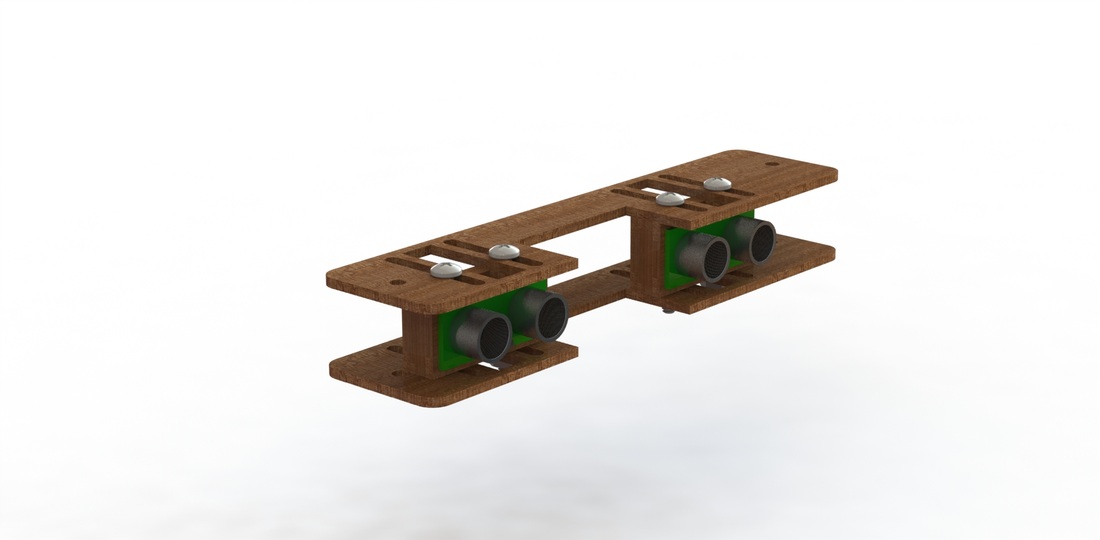
Megatron charges across the field through the use of 2 TLE5206 half H-Bridge ICs driven through pulse width modulation at 7.5 kHz in drive-brake mode. He incorporates 2 ultrasonic sensors mounted facing the center divider, one near its front and one near its rear, for his control algorithm.
The control algorithm consists first of an outer loop controlling for average distance of the two sensors from the wall. This outputs an offset that feeds into the inner control loop controlling for how parallel Megatron is by evaluating the difference in distance outputs from the two sensors. We used proportional gains for each loop, and tuned them such that parallel control was given the correct ratio of priority over distance control such that Megatron was sufficiently parallel to score goals as well as reliably aligning its infrared LEDs to reload at the reload station.
As well as the two ultrasonic sensors used for driving distance and parallel control, there are two ultrasonic sensors mounted at the front and rear of Megatron facing either home zone. These are used to slow and stop Megatron at certain distances from the wall at the end of the field so that he doesn’t race into the wall and unhorse himself, ending the game and deducting points from his score.
Megatron charges across the field through the use of 2 TLE5206 half H-Bridge ICs driven through pulse width modulation at 7.5 kHz in drive-brake mode. He incorporates 2 ultrasonic sensors mounted facing the center divider, one near its front and one near its rear, for his control algorithm.
The control algorithm consists first of an outer loop controlling for average distance of the two sensors from the wall. This outputs an offset that feeds into the inner control loop controlling for how parallel Megatron is by evaluating the difference in distance outputs from the two sensors. We used proportional gains for each loop, and tuned them such that parallel control was given the correct ratio of priority over distance control such that Megatron was sufficiently parallel to score goals as well as reliably aligning its infrared LEDs to reload at the reload station.
As well as the two ultrasonic sensors used for driving distance and parallel control, there are two ultrasonic sensors mounted at the front and rear of Megatron facing either home zone. These are used to slow and stop Megatron at certain distances from the wall at the end of the field so that he doesn’t race into the wall and unhorse himself, ending the game and deducting points from his score.

Megatron Key Feature: Shooting
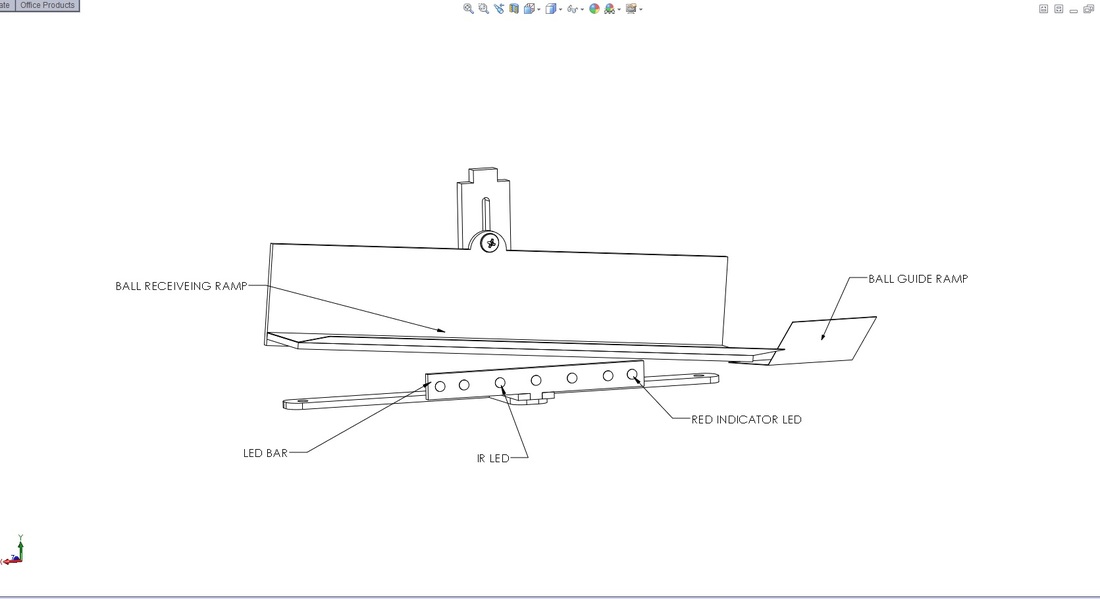
Megatron shoots with a ramp and top-mounted pitching wheel mechanism. The general concept is that balls are loaded onto a ramp above a spinning wheel mounted such that it compresses the foam balls as they contact the wheel, giving sufficient traction to launch the balls in the direction defined by the ramp.
Two servo-actuated gates are utilized to control Megatron’s shooting ability. The closest gate to the shooting wheel is called the firing gate, and blocks the balls until the signal is given to fire, at which time it is raised. At this time, the loading gate, placed further up the ramp, comes down to block the next ball, keeping it in place until the firing gate is lowered. Here, the loading gate is raised, loading the next ball into the “firing chamber.”
This process may be repeated for each shot. For rapid fire, which Megatron employs to score all balls at once into the opponent’s goal, both gates are raised for a set period deemed long enough to release all balls to the pitching wheel.
Megatron shoots with a ramp and top-mounted pitching wheel mechanism. The general concept is that balls are loaded onto a ramp above a spinning wheel mounted such that it compresses the foam balls as they contact the wheel, giving sufficient traction to launch the balls in the direction defined by the ramp.
Two servo-actuated gates are utilized to control Megatron’s shooting ability. The closest gate to the shooting wheel is called the firing gate, and blocks the balls until the signal is given to fire, at which time it is raised. At this time, the loading gate, placed further up the ramp, comes down to block the next ball, keeping it in place until the firing gate is lowered. Here, the loading gate is raised, loading the next ball into the “firing chamber.”
This process may be repeated for each shot. For rapid fire, which Megatron employs to score all balls at once into the opponent’s goal, both gates are raised for a set period deemed long enough to release all balls to the pitching wheel.